
城镇化区域无人机低空航路网迭代构建的理论体系与技术路径
|
徐晨晨(1991-), 女, 安徽人, 博士生, 主要从事无人机航路规划、无人机遥感等研究。E-mail: xucc.14s@igsnrr.ac.cn |
收稿日期: 2019-11-11
要求修回日期: 2020-04-20
网络出版日期: 2020-07-25
基金资助
国家重点研发计划(2017YFB0503005)
国家自然科学基金项目(41971359)
国家自然科学基金项目(41771388)
天津市智能制造专项(Tianjin-IMP-2)
版权
Iterative construction of UAV low-altitude air route network in an urbanized region: Theoretical system and technical roadmap
Received date: 2019-11-11
Request revised date: 2020-04-20
Online published: 2020-07-25
Supported by
National Key R&D Program of China(2017YFB0503005)
National Natural Science Foundation of China(41971359)
National Natural Science Foundation of China(41771388)
Tianjin Intelligent Manufacturing Project(Tianjin-IMP-2)
Copyright
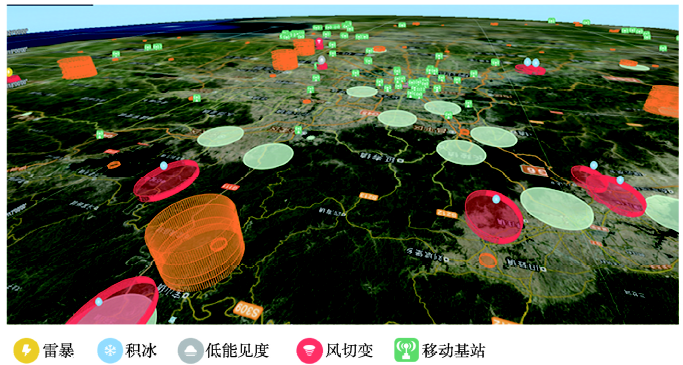
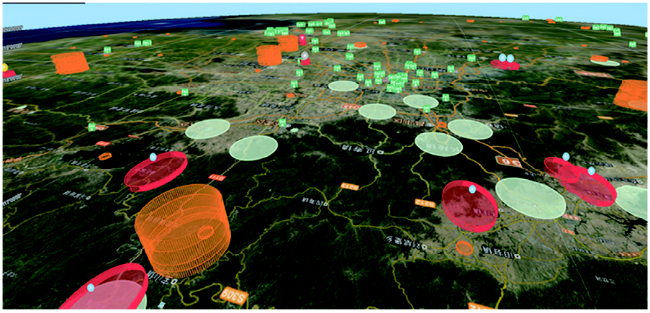
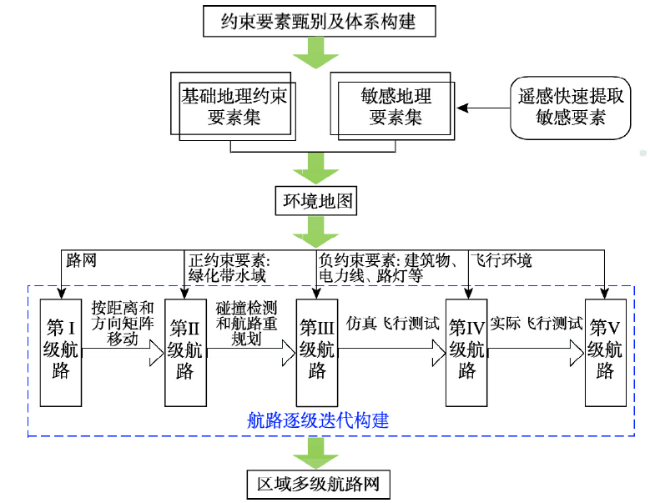
由于低空环境复杂,当前以无人机为应用主体的低空空域资源开发安全性和利用效率较低。而随着无人机数量的迅猛发展和商业化应用的快速扩张,旺盛的飞行需求与有限的飞行空间在低空的矛盾日益突出,如何安全、高效地管理无人机低空活动成为突出问题。目前各国都在探索解决途径,其中无人机低空航路是一种由中国科学院率先提出并得到业界和中国民用航空局认可的无人机低空交通和低空资源高效利用的综合解决方案。然而,这一概念还处在探索阶段,如何构建还不太明晰,尤其是对于地表环境复杂和高动态变化的城镇化区域,如何快速获取高精度的地理信息以满足无人机安全、高效飞行也是一大难题。鉴于遥感技术在航路的敏感信息提取与深化处理方面呈现出良好的应用前景,本文提出一种基于遥感和地理信息技术的城镇化区域低空公共航路网的高效迭代构建方法,并从理论支撑和已有研究基础论证了该方法的可行性。该研究技术路径主要包括基于地面路网生成具有多高度层的I级航路网,以充分利用地面交通设施;利用航路正约束地理要素生成II级航路网,如沿路的城市绿地和水域;规避负约束地理要素构建III级航路网,主要包括建筑物、通信盲区和电力线(杆)等;最后,通过仿真飞行和实际飞行测试分别生成IV、V级航路网,通过实际量测对比分析来检验无人机飞行的环境地图,保证飞行的安全性。以上方法基于遥感、地理信息、航空、交通等交叉学科解决无人机低空运行难题,为构建无人机低空航路网提供了一种新思路。更进一步讲,本文在低空领域运用地理学方法构建无人机航路网,是继无人机遥感应用之后无人机在地理学应用的又一大突破,同时也拓展了地理学的研究范畴,必将推动地理科学发展。
徐晨晨 , 叶虎平 , 岳焕印 , 谭翔 , 廖小罕 . 城镇化区域无人机低空航路网迭代构建的理论体系与技术路径[J]. 地理学报, 2020 , 75(5) : 917 -930 . DOI: 10.11821/dlxb202005003
The complexity in low altitude has hindered the development and utilization of low-altitude airspace resources with UAVs as the main application users. With the rapid increase of UAV numbers and the rapid expansion of commercial application of UAVs, the conflict between the increasing flight demand and the limited flight space is increasingly prominent at low altitude. Therefore, how to conduct the activities of UAVs at low-altitude safely and efficiently is a problem to be urgently solved. Many countries or regions are looking for solutions. Among the proposed solutions or methods, the low-altitude public air route network of UAVs, which is proposed firstly by the Chinese Academy of Sciences (CAS) to orderly manage UAV low-altitude traffic and efficiently utilize low-altitude resources, has been widely recognized. However, the concept is still in the early exporting stage and is not clear on how to construct. In addition, how to quickly acquire high-precision geographic information to support safe and efficient flights of UAV in low altitude, especially in urban areas with complex and high-dynamic changeable surface environment, is also difficult. In view of the promising application of remote sensing (RS) technology in extracting and processing air route sensitive elements, this paper proposes a method to efficiently and iteratively construct the low-altitude public air route network by RS and geographic information technology in urban areas, and then demonstrates the feasibility of this method from theoretical support and existing research foundation. The technical roadmap includes four steps: (1) generating the first-level air route network based on ground roads to make full use of ground traffic facilities; (2) constructing the second-level air route network by using positive constraints of air routes, such as green lands and waters; (3) constructing the third-level air route network by avoiding negative constraints of air routes, including buildings, weak-communication areas and power lines (poles); (4) generating the fourth- and fifth-level air route network by simulated flight and practical flight tests. Comparative analysis between actual measurement and simulated environment map is conducted to ensure safe UAV flights. The method proposed above comprehensively utilizes interdisciplinary technologies such as RS, geographic information system (GIS), aviation and transportation, and provides a new way to make safe and efficient UAV operations in low altitude. Furthermore, this paper uses geography method to construct UAV air route network in low altitude, which is another breakthrough in the application of UAVs in geography after UAV remote sensing application. It also expands the research scope of geography and will certainly promote the development of geographic science.
表1 民用航空航线网与无人机低空公共航路网对比分析Tab. 1 Comparison of civil aviation airline network and low-altitude public air route network of UAVs |
| 类型 | 民用航空航线网 | 无人机低空公共航路网 |
|---|---|---|
| 规划范围 | 一般是6000 m以上的中高空空域。 | 低空甚至超低空空域,一般在移动通信信号覆盖高度范围内(300 m [23]),高度随着通信技术发展而增加。 |
| 与地面交通联系 | 不利用地面交通设施,与地面交通无直接联系。 | 基于地面路网生成第I级航路,与地面路网融合度较高。 |
| 地理信息 | 与地表地理信息几乎无关,局部高原地区受地形和恶劣天气影响。 | 考虑的地理约束要素较多,要素尺度跨度大,如地形、建筑物、电力线(杆)、风力发电塔、水域、地面路网、移动通信基站、无人机管控区、大气环境等;数据来源于地理信息调查和无人机遥感地物快速识别和提取技术。 |
| 航路/线设计 | 先构建交通枢纽,再划设航线,最后形成航线网;枢纽间的航线由途径的导航台间连线构成,避开了航空管制区和危险天气易发区。 | 迭代构建:基于地面路网垂直拔高构建第I级航路网;利用正约束地理要素移动构建第II级航路网;规避负约束地理要素构建第III级航路网;经过仿真和实际飞行测试分别构建第IV、V级航路网。 |
| 航路/线更新与时效性 | 时效性长,不轻易更新。 | 由于影响地理要素多且更新快,航路的更新周期较短,时效性也较短,需定期检测冲突航路段并进行局部航路的动态重规划。 |
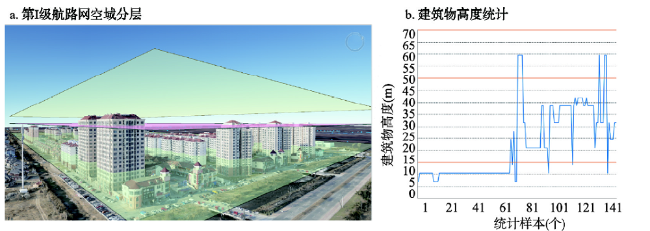
图3 第I级航路网空域分层示意图和建筑物高度统计图注:以京津新城某小区单元为例,图b中蓝线为建筑物高度,黄线为空域划分高度层。 Fig. 3 Diagram of vertical division of airspace for first-level air route network (a) and chart of building heights (e.g. a residential area in Jingjin New Town. In Figure b, the blue line refers to building height, the yellow line refers to each height level of airspace.) |
图4 实际调查的京津新城道路与绿化带以及河流间相对位置示意图注:a、b表示绿化带与道路位置关系,绿化带分别位于道路一侧和道路中间;c表示河流与道路位置关系,河流位于道路一侧;其中各分图中的绿化带和河流均用黄线标出。 Fig. 4 Diagram of the relative position between the road and the green land and the river ((a) represents that green land is located on either side of road; (b) represents that green land is located in the middle of the road; (c) represents that river is located on either side of the road. Both the green land and river in each figure are marked with yellow lines.) |
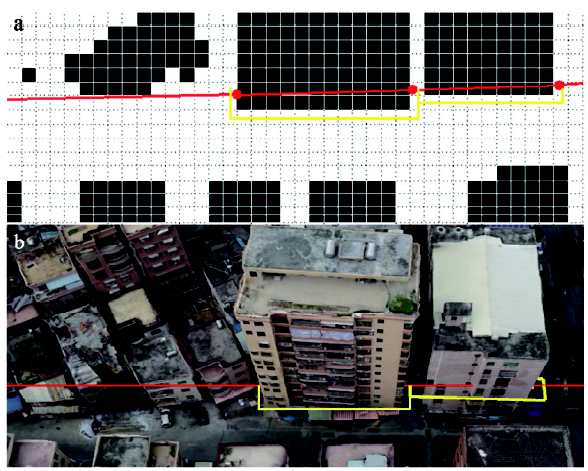
图5 冲突航路段检测与重规划示意图注:a与b分别为同一区域栅格环境地图下和对应真实场景下的航路与建筑物冲突航路段(红线)以及重规划航路段(黄线) Fig. 5 Diagram of collision detection and re-planning of air routes(a and b are the air route that conflicts with buildings (red lines) and re-planned sections (yellow lines) in grid environment map and real scene, respectively.) |
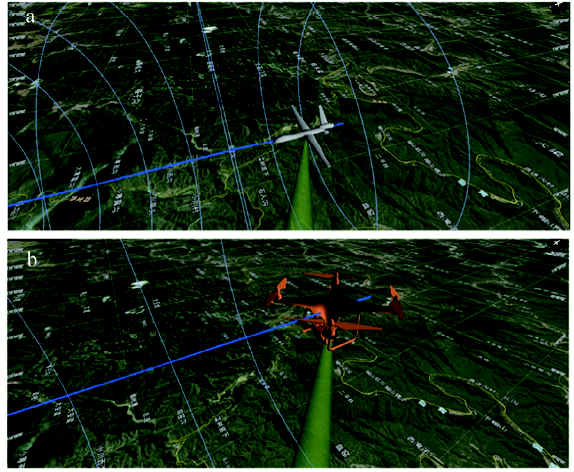
图7 真实场景下无人机在低空航路内的仿真飞行示意图注:蓝色弧线表示航路边界,底图为真实地形场景;a为固定翼无人机,b为多旋翼无人机。 Fig. 7 Diagram of UAV's simulated flights within low-altitude air routes based in real scene (the blue arc refers to the air route boundary, the base map is the real terrain data, (a) is a fixed-wing UAV and (b) is a multi-rotor UAV) |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
Airworthiness Certification. Monthly Report of Real-name Registration of UAVs (2019-7). 2019. .
[ 无人机适航审定. 无人机实名登记月报情况(2019-7). 2019. .]
|
| [5] |
Inspection Center for Civil UAVs. The Statistics Report of UAV Cloud Data in Second Quarter of 2019. 2019. .
[ 民用无人机检验中心. 2019年第二季度无人机云数据统计. 2019. .]
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
[ 张丰蘩 . 无人机管控: 政策与科技并行. 中国民航报, 2019-11-08. .]
|
| [10] |
|
| [11] |
[ 柏艺琴, 陈新锋 . 中国无人机运行数据统计报告, 北京: 中国民航出版社, 2019: 5.]
|
| [12] |
CAAC. Data Specification of UAV Cloud System Interface (MH/T 2009-2017). .
[ 中国民用航空局. 无人机云系统接口数据规范(MH/T 2009-2017). 2017. .]
|
| [13] |
CAAC. Guidelines on Promoting the Development of Civil Unmanned Aviation (Draft for Comments). 2019. .
[ 中国民用航空局. 关于促进民用无人驾驶航空发展的指导意见(征求意见稿). 2019. .]
|
| [14] |
IEEE. 1939.1-Standard for a framework for structuring low altitude airspace for unmanned aerial vehicles (UAV) operations. 2019. .
|
| [15] |
[ 廖小罕, 徐晨晨, 岳焕印 . 基于地理信息的无人机低空公共航路规划研究. 无人机, 2018(2):45-49.]
|
| [16] |
[ 徐业刚 . 民航局颁发首张城市无人机试运行“牌照”. 中国民航报, 2019-11-8. .]
|
| [17] |
Antwork. China UAV logistics route network planning seminar was held in Hangzhou for the first time. 2019. .
[ 迅蚁. 中国无人机物流航线网络规划研讨会初次在杭举行. 2019. .]
|
| [18] |
|
| [19] |
|
| [20] |
[ 鹿明, 廖小罕, 岳焕印 , 等. 面向全国洪涝灾害应急监测的无人机空港布局. 地球信息科学学报, 2019,21(6):854-864.]
|
| [21] |
[ 徐晨晨, 廖小罕, 岳焕印 , 等. 基于改进蚁群算法的无人机低空公共航路构建方法. 地球信息科学学报, 2019,21(4):570-579.]
|
| [22] |
IGSNRR. The integrated management cloud-based system of UAVs named "Zhongke SkyNet" was officially approved to operate by the civil aviation administration of China. 2019. . The integrated management cloud-based system of UAVs named "Zhongke SkyNet" was officially approved to operate by the civil aviation administration of China. 2019. .
[ 中国科学院地理科学与资源研究所. “中科天网”无人机综合管理云系统正式获得中国民用航空局批准运行. 2019. . “中科天网”无人机综合管理云系统正式获得中国民用航空局批准运行. 2019. .]
|
| [23] |
CAAC. Test report of safe flights in low altitude for networked UAVs. 2018. .
[ 中国民航总局. 低空联网无人机安全飞行测试报告. 2018. .]
|
| [24] |
Century Business Review. Drones go into cities, Drones go into cities, and the Starbucks and the Luckin Coffee can be delivered. 2018. .
[ 世纪商业评论. 星巴克、瑞幸咖啡均可实现配送. 2018. .]
|
| [25] |
CAAC. Interim regulations on flight management of unmanned aircraft (Draft for comments). 2018. .
[ 中国民用航空局. 《无人驾驶航空器飞行管理暂行条例(征求意见稿)》. 2018. .]
|
| [26] |
CAAC. Fence of unmanned aircraft system. MH/T 2008-2017. 2017. .
[ 中国民用航空局. 无人机围栏. 2017. MH/T 2008-2017 .]
|
| [27] |
|
| [28] |
[ 廖小罕 . “无人机遥感与组网”专辑导言. 地球信息科学学报, 2019,21(4):475.]
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
[ 赵长森, 潘旭, 杨胜天 , 等. 低空遥感无人机影像反演河道流量. 地理学报, 2019,74(7):1392-1408.]
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
[ 余洁, 穆超, 冯延明 , 等. 机载LiDAR点云数据中电力线的提取方法研究. 武汉大学学报(信息科学版), 2011,36(11):1275-1279.]
|
| [40] |
|
| [41] |
[ 甄然, 甄士博, 吴学礼 . 一种基于人工势场的无人机航迹规划算法. 河北科技大学学报, 2017,38(3):278-284.]
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}